近日,中心许文盈教授、虞文武教授及其合作者在无模型多无人系统的直接数据驱动协同控制及可扩展协同理论研究中取得了重要突破。随着现代自动控制系统在结构、环境以及传感模式上的复杂性不断提升,传统基于系统机理模型的控制理论逐渐难以满足实际需求。以机器学习为核心的新一代人工智能技术的蓬勃发展,进一步推动了端到端数据驱动控制设计方法的创新,其展现出明显优势。这一趋势引发了对控制与优化理论基础的深刻反思——能否实现从传统基于模型的控制向基于数据的控制的根本转变,已成为当前研究的前沿热点。
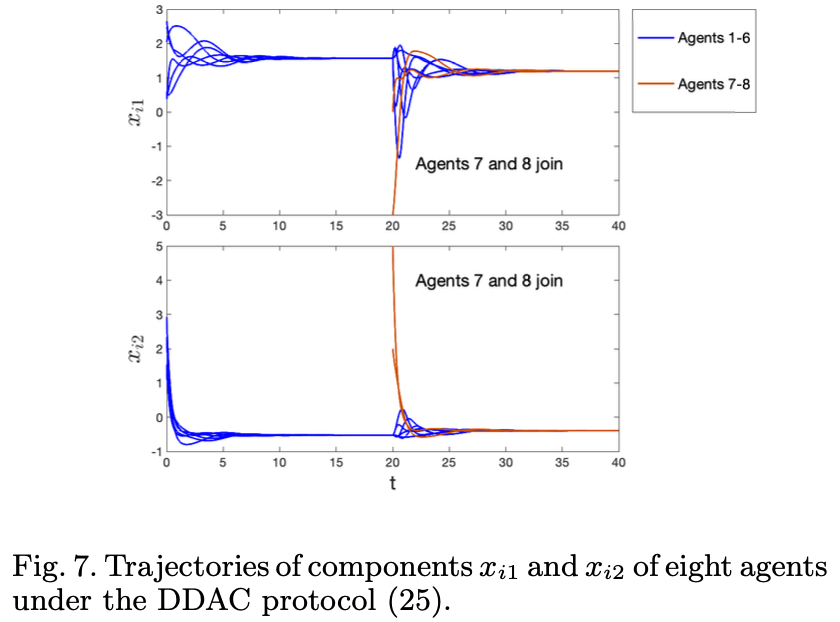
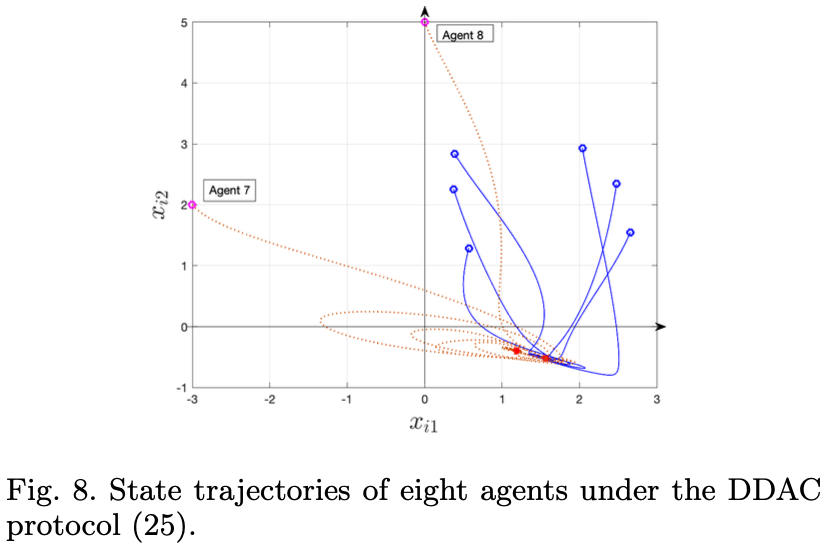
为了揭示开放网络中无模型多无人系统一致性行为的演化机理,中心许文盈教授及其合作者提出了一种基于直接数据驱动的自适应一致性协议。该协议融合了离线与在线的设计方式,通过离线数据直接确定协同控制参数,并利用在线数据实现耦合权重的自主动态调整。其中,研究的一项重要成果是建立了从噪声数据到控制设计的直接映射关系,避免了传统系统辨识和数据去噪的复杂过程。理论分析进一步证明了该自适应协议在开放环境下的有效性与可扩展性,这一重要结果为无模型多智能系统的协同控制提供了快速响应与自主演化的能力。
该研究成果于2024年10月29日以“Data-Driven Adaptive Consensus for Linear Multi-agent Systems: A Scalable Distributed Protocol”为题以Regular Paper形式被国际权威期刊Automatica接受发表。该成果得到了江苏省应用数学研究中心课题和国家自然科学基金的支持。